给出电机的各个参数,构建电机的传递函数,基于simulink建立的PID二连杆机械手臂建模与控制,控制机械手臂转过的角度,SimMechanics、SimScape +Simulink混合模型
”PID silulink 二连杆机械手臂角度控制 传递函数“ 的搜索结果
基于matlab的二连杆机械臂的滑模控制
2.附赠案例数据可直接运行matlab程序。 3.代码特点:参数化编程、参数可方便更改、代码编程思路清晰、注释明细。 4.适用对象:计算机,电子信息工程、数学等专业的大学生课程设计、期末大作业和毕业设计。
使用simulink/simscape搭建二连杆模型,进行PD独立控制和PD+重力补偿控制。 使用simulink/simscape搭建二连杆模型,进行PD独立控制和PD+重力补偿控制。 使用simulink/simscape搭建二连杆模型,进行PD独立控制和PD+...
随着工业生产技术的迅猛发展,机械臂在制造业中的地位越来越突出。...然后,针对二自由度机械臂设计PD控制器,并基于S函数在MATLAB中搭建Simulink控制图,对采用PD控制的机械臂的轨迹跟踪性能进行了仿真研究。
一个机器人模型,二连杆matlab仿真,力位置控制,传统pd控制率, simlink模型,

这里写自定义目录标题欢迎使用Markdown编辑器新的改变功能快捷键合理的创建标题,有助于目录的生成如何改变文本的样式插入链接与图片如何插入一段漂亮的代码片生成一个适合你的列表创建一个表格设定内容居中、居左、...
基于单片机的机械手臂控制系统设计 (1).pdf
源码-二连杆动力学建模.zip
标签: 动力学建模
二连杆动力学建模,matlab程序非simulink实现,动力学建模通过拉格朗日方程实现。
二连杆机械臂MATLAB S函数仿真代码
MATLAB下机器人可视化与控制---simulink篇中的简单例子,在Simulink中做了预定义轨迹的运动和Slider Gain控制的运动,用GUI控制的关节代码在MATLAB下机器人可视化与控制---simulin(3)中贴有!
模糊规则优化的滑模控制器实现两连杆机械臂的轨迹跟踪控制
该文件描述了双连杆机械臂的运动学
平面型二连杆机器人位形空间RRT避障轨迹规划(MATLAB)

在一个我可以轻松模拟和可视化机械手臂的位置和方向的环境中,学习和实施数学和物理基础知识的目标。 我从最基本的内容开始,并涵盖了以下几点: 2D和3D平面的变换和方向。 执行串行机器人的反向和正向运动学,并在...
二杆机械臂的动力学建模与仿真pdf,二杆机械臂的动力学建模与仿真
基于二连杆任务的深度强化学习算法分析与比较.pdf
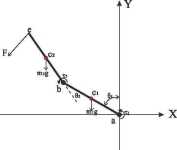
机械臂关节运动为纯旋转,所以仅存在为角度的广义坐标:、;重力加速度为:。 根据定义 拉格朗日方程: 其中, L为拉格朗日函数,而K为系统广义动能,P为系统广义位能; 为连杆子系统索引号();为第个子...
相信布置作业时老师已经讲完了状态空间方程,可通过泰勒级数将三角函数项展开,从而使方程线性化,但这种方法误差未知,写这个的时候我们刚讲到线性化(可以尝试,当时只有我们组采取了这种思路)。 3、simulink内有...

双连杆机械手的标准问题是在运动学和动态学上开发的。 然后控制它跟踪旋转的椭圆。 非线性项(如重力/惯性等)在不同程度上被完全抵消,并研究了性能。 该文件是在纽约州立大学布法罗分校的 Venkat Krovi 博士的监督...
二连杆机械臂是一种常用的工业机器人,它具有良好的控制性能和较高的工作精度。它的运动方式就是通过两个连杆实现对末端效应器的位置和方向的控制。 在画圆时,首先需要确定机械臂各关节的参数,包括连杆长度、初始...
首先要建立二连杆机械手的拉格朗日函数,这个函数是系统的动能减去势能的差。然后要计算这个函数对时间的导数,即 Lagrange 方程。由 Lagrange 方程,可以得到系统的运动方程。这些方程将包含各个关节的角度、角速度...
二连杆机械臂是一种常见的机器人结构,由两个相互连接的杆件组成,其中一个杆件通过电机或气动元件驱动,另一个杆件则负责传递和转化运动。 具体来说,二连杆机械臂的结构由以下几个部分组成: 1. 底座:固定机械...
关于二连杆机械臂最基础的入门论文,可以根据模型实际推导出模型与仿真
二连杆机械臂是一种常见的串联式机械臂,由两个相互连接的杆组成,其中一个杆与固定支架相连,另一个杆则通过旋转关节连接到第一个杆的末端。二连杆机械臂的运动学特点如下: 1. 自由度:二连杆机械臂具有两个自由...
推荐文章
- 用好ASP.NET 2.0的URL映射-程序员宅基地
- C语言等级考试是把题目删了,历年全国计算机的等级考试二级C语言上机考试地训练题目库及答案详解(72页)-原创力文档...-程序员宅基地
- Microsoft Office显示正在更新无法打开的问题_正在更新microsoft 365和office-程序员宅基地
- 非常好的Ansible入门教程(超简单)-程序员宅基地
- 【Gradle-8】Gradle插件开发指南-程序员宅基地
- 使用PL/SQL Developer软件解锁_plsqldev表格锁怎么打开-程序员宅基地
- 【Windows Server 2019】Web服务 IIS 配置与管理——配置 IIS 进阶版 Ⅳ_iis默认路径-程序员宅基地
- 网络中的各层协议_发送消息时各层协议-程序员宅基地
- UCRT: VC 2015 Universal CRT, by Microsoft_vc15rt-程序员宅基地
- 关于EntityFramework 7 开发学习_entiry framework 7 书籍-程序员宅基地